0
Cart
SIGN IN
All Categories
Arduino
Arduino Models
Kits for Arduino
Shield for Arduino
Sensors and Models for Arduino
Raspberry Pi
Raspberry Pi Kits
Raspberr Pi Boards
Raspberry Pi Screens - Displays
Raspberry Pi Cases
Micro SD and Memory Cards
Raspberry Pi Camera, Shield and Moduls
Cables For Raspberry Pi
Raspberry Pi Accessories
3D
3D Yazıcı
3D Yazıcı Parçaları / DIY
3D Filament
3D Kalem Yazıcı
3D Tarayıcı
CNC
Eğitici Setler
Arduino Kits
Robotistan Special Products
REX
Science Kits
Raspberry Pi Kits
Robot Kits
Makeblock
DIY Kits
BBC Micro:Bit
STEM LAB
Okul Eğitim Setleri
Grove Sensors, Moduls and Kits
DFRobot
LEGO
Coding
Tinylab
Robot Yarışması
Çocuklar İçin
Pre-School (Ages 4-7)
Elementary School (Ages 7-10)
Middle School (Ages 10-14)
High School (Ages 14+)
Geliştirme Kartı
Tinylab
ST/STM Arm Development Board
LattePanda
BeagleBoard
FPGA
Orange Pi
Robotik Kartlar
NodeMCU / ESP
NVIDIA
ASUS
Others
Wearables
Elektronik Kart
Adreslenebilir LED (NeoPixel)
Motor Drivers
Voltage Regulators
Relay Boards
Converters
Programmer Boards
Modules
Displays
Motor
Servo Motor
Step Motor
Titreşim Motoru
Fırçasız Motor
Redüktörlü DC Motor
Redüktörsüz DC Motor
Fan
Sıvı/Hava Pompa
Lineer Akülatör
Yüksek Torklu DC Motor
Sensör
Voltage / Current
Sıvı ve Yağmur Sensörleri
Temperature / Humidity
Encoder / Magnetic
Force / Flex / Vibration / Tilt
Accelerometers / Gyros
Light / Color
Gas
IMU
Line / Proximity
Biometric / Medical
Pressure / Altitude / Compass
Others
Güç Kaynağı - Batarya
Powerbank
Household Batteries
Li-Po Batteries
Dry Accumulators
Solar Cells
Power Supply
Accessories
Adapters / Chargers
Prototipleme / Lehimleme
Soldering Equipments
Jumper Cables
Soldering Iron and Stations
Perfboards
Breadboards
Copper Circuit Plate - PCB
Kablosuz Haberleşme
Xbee
Wifi
RF
GSM
GPS
Bluetooth
Antennas / Connectors
Komponent
Voltage Regulator
Varistör / NTC / PTC
Trimpot
Transistor
Fuse
Relay
Potentiometer
Peltier
Optocoupler
Mosfet
Microcontroller
LED, LCD and Display
Crystal Oscillator
Capacitor
Connector / Screw Terminal
Keypad
Joystick
IC
Diode
Resistor
Dip Socket
Buzzer/Hoparlör
Bobbin
Button / Switch
Mekanik
Sensör Tutucu
Robotic Parts
Plastic Distance
Motor Bracket
Metal Distance
Coupler
Wheel Hub
Chassis
Elektromıknatıs
Screw / Nut / Washer
Tekerlek
Setskurlu Tekerlek
Sarhoş Tekerlek
Palet / Serbest Teker
Omni and Mecanum Wheel
Geçmeli Tekerlek
Ölçü ve Test Aleti
Thermometer
Oscilloscope
Multimeter
Others
Araç - Gereç
Flush Cutter / Cable Cutter
Silikon Tabancası
Case / Enclosure
Organizer
Stationery
Kesme Matı
Driller / Cutter
Pliers
Cable / Converter
Heatshrink Tubing
Other Tools
Tweezers / Screwdriver
Magnifier / Vise
Tape
Antistatic
Kablo Bağı
Drone
Multicopter / Drone
Multicopter Parts
Connector / Plug
Servo Extension Cable
2.4 Ghz Radio Control
Drone Batarya
Outlet
Outlet Raspberry Pi
3D Outlet
Maker Kits Outlet
Geliştirme Kartı Outlet
Elektronik Kart Outlet
Komponent Outlet
Tekerlek Outlet
Drone Outlet
Diğer Outlet
Kitap
Arduino Books
Web Books
Electronical and Robotic Books
Children's Books
Computer ve Software Books
Other Books
New Products
Educational Kits
3D Printer
Outlet
Arduino
Fault Report
EN
Türkçe
English
TL
TL
USD
EUR
GBP
Menu
All Categories
All Categories
Arduino
Arduino
Arduino Models
Kits for Arduino
Shield for Arduino
Sensors and Models for Arduino
See All
Raspberry Pi
Raspberry Pi
Raspberry Pi Kits
Raspberr Pi Boards
Raspberry Pi Screens - Displays
Raspberry Pi Cases
Micro SD and Memory Cards
Raspberry Pi Camera, Shield and Moduls
Cables For Raspberry Pi
Raspberry Pi Accessories
See All
3D
3D
3D Yazıcı
3D Yazıcı Parçaları / DIY
3D Filament
3D Kalem Yazıcı
3D Tarayıcı
CNC
See All
Eğitici Setler
Eğitici Setler
Arduino Kits
Robotistan Special Products
REX
Science Kits
Raspberry Pi Kits
Robot Kits
Makeblock
DIY Kits
BBC Micro:Bit
STEM LAB
Okul Eğitim Setleri
Grove Sensors, Moduls and Kits
DFRobot
LEGO
Coding
Tinylab
Robot Yarışması
See All
Çocuklar İçin
Çocuklar İçin
Pre-School (Ages 4-7)
Elementary School (Ages 7-10)
Middle School (Ages 10-14)
High School (Ages 14+)
See All
Geliştirme Kartı
Geliştirme Kartı
Tinylab
ST/STM Arm Development Board
LattePanda
BeagleBoard
FPGA
Orange Pi
Robotik Kartlar
NodeMCU / ESP
NVIDIA
ASUS
Others
Wearables
See All
Elektronik Kart
Elektronik Kart
Adreslenebilir LED (NeoPixel)
Motor Drivers
Voltage Regulators
Relay Boards
Converters
Programmer Boards
Modules
Displays
See All
Motor
Motor
Servo Motor
Step Motor
Titreşim Motoru
Fırçasız Motor
Redüktörlü DC Motor
Redüktörsüz DC Motor
Fan
Sıvı/Hava Pompa
Lineer Akülatör
Yüksek Torklu DC Motor
See All
Sensör
Sensör
Voltage / Current
Sıvı ve Yağmur Sensörleri
Temperature / Humidity
Encoder / Magnetic
Force / Flex / Vibration / Tilt
Accelerometers / Gyros
Light / Color
Gas
IMU
Line / Proximity
Biometric / Medical
Pressure / Altitude / Compass
Others
See All
Güç Kaynağı - Batarya
Güç Kaynağı - Batarya
Powerbank
Household Batteries
Li-Po Batteries
Dry Accumulators
Solar Cells
Power Supply
Accessories
Adapters / Chargers
See All
Prototipleme / Lehimleme
Prototipleme / Lehimleme
Soldering Equipments
Jumper Cables
Soldering Iron and Stations
Perfboards
Breadboards
Copper Circuit Plate - PCB
See All
Kablosuz Haberleşme
Kablosuz Haberleşme
Xbee
Wifi
RF
GSM
GPS
Bluetooth
Antennas / Connectors
See All
Komponent
Komponent
Voltage Regulator
Varistör / NTC / PTC
Trimpot
Transistor
Fuse
Relay
Potentiometer
Peltier
Optocoupler
Mosfet
Microcontroller
LED, LCD and Display
Crystal Oscillator
Capacitor
Connector / Screw Terminal
Keypad
Joystick
IC
Diode
Resistor
Dip Socket
Buzzer/Hoparlör
Bobbin
Button / Switch
See All
Mekanik
Mekanik
Sensör Tutucu
Robotic Parts
Plastic Distance
Motor Bracket
Metal Distance
Coupler
Wheel Hub
Chassis
Elektromıknatıs
Screw / Nut / Washer
See All
Tekerlek
Tekerlek
Setskurlu Tekerlek
Sarhoş Tekerlek
Palet / Serbest Teker
Omni and Mecanum Wheel
Geçmeli Tekerlek
See All
Ölçü ve Test Aleti
Ölçü ve Test Aleti
Thermometer
Oscilloscope
Multimeter
Others
See All
Araç - Gereç
Araç - Gereç
Flush Cutter / Cable Cutter
Silikon Tabancası
Case / Enclosure
Organizer
Stationery
Kesme Matı
Driller / Cutter
Pliers
Cable / Converter
Heatshrink Tubing
Other Tools
Tweezers / Screwdriver
Magnifier / Vise
Tape
Antistatic
Kablo Bağı
See All
Drone
Drone
Multicopter / Drone
Multicopter Parts
Connector / Plug
Servo Extension Cable
2.4 Ghz Radio Control
Drone Batarya
See All
Outlet
Outlet
Outlet Raspberry Pi
3D Outlet
Maker Kits Outlet
Geliştirme Kartı Outlet
Elektronik Kart Outlet
Komponent Outlet
Tekerlek Outlet
Drone Outlet
Diğer Outlet
See All
Kitap
Kitap
Arduino Books
Web Books
Electronical and Robotic Books
Children's Books
Computer ve Software Books
Other Books
See All
New Products
Educational Kits
3D Printer
Outlet
Arduino
Fault Report
English
Türkçe
English
Türk Lirası
TL
USD
EUR
GBP
SIGN IN
Stay signed in
Forgot password?
SIGN IN
REGISTER
Sign In with
Sign In with
Cart
Filter
{{ CAT. NAME }}
{{ SUB. NAME }}
{{ SUB. NAME }}
{{ FILTERS.VARIANTS.TYPE1_NAME }}
{{ V1.NAME }}
{{ FILTERS.VARIANTS.TYPE2_NAME }}
{{ V2.NAME }}
Brand
{{ B.NAME }}
{{ !is_brand ? " " : "" }}
Model
{{ M.NAME }}
{{ FILTER.NAME }}
{{ F.NAME }}
{{ F.NAME }}
Price
Filter Selected
Filter
Alphabetical Asc
Alphabetical Desc
Newest to Oldest
Oldest to Newest
Price: High to Low
Price: Low to High
Random
Sort By Score
Sort By Default
Alphabetical Asc
Alphabetical Desc
Newest to Oldest
Oldest to Newest
Price: High to Low
Price: Low to High
Random
Sort By Score
Sort By Default
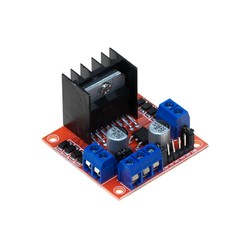
L298N Pair Motor Driver Board with Voltage Regulator(Red PCB)
66.57
TL
Add to Cart
28 BYJ-48 Geared Stepper Motor and ULN2003A Stepper Motor Driver Board
64.99
TL
Add to Cart
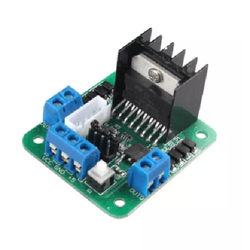
L298 Pair Motor Driver Board - Dual Motor Driver (Green PCB)
119.67
TL
Add to Cart
BTS7960B 40 Amper Motor Driver Board
206.05
TL
Add to Cart
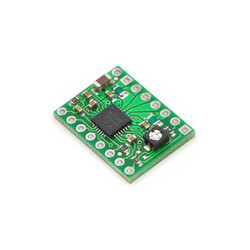
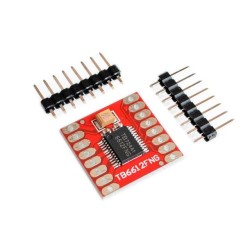
TB6612FNG Stepper Motor / DC Motor Driver
95.89
TL
Add to Cart
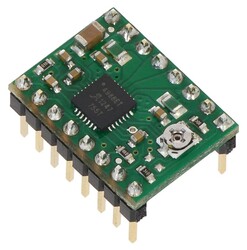
DRV8825 Step Motor Driver Board
79.25
TL
Add to Cart
L9110 Pair Motor Driver Board
37.25
TL
Add to Cart
A4988/DRV8825 Stepper Motor Driver Control Board
55.48
TL
Add to Cart
EasyDriver Step Motor Driver Board
313.04
TL
Add to Cart
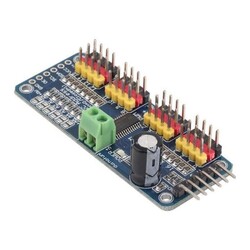
PCA9685 16 Channel I2C PWM/Servo Driver Board(Clon)
198.13
TL
Add to Cart
%
25
SparkFun Block for Intel® Edison - Dual H-Bridge
1,030.26
TL
772.70
TL
Add to Cart
Servo Driver for micro:bit, 16-Channel, 12-bit, I2C
606.27
TL
Add to Cart
%
5
Raspberry Pi Motor Driver Board v1.0
2,341.86
TL
2,224.77
TL
Add to Cart
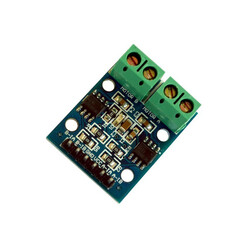
5-35V 30A Pair Motor Driver Board
1,787.90
TL
Add to Cart
5-35V 15A Pair Motor Driver Board
747.73
TL
Add to Cart
DRV8833 Pair Motor Driver Board
475.90
TL
Add to Cart
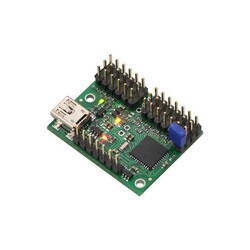
12 Channel USB Servo Motor Control Board
2,714.34
TL
Add to Cart
20A ESC - BRUSHLESS MOTOR DRIVER
463.62
TL
Add to Cart
6 Channel USB Servo Motor Control Board
1,046.11
TL
Add to Cart
DRV8825 Step Motor Driver Board
863.83
TL
Add to Cart
New
DRV8833 Stepper Motor Driver Board
49.14
TL
Add to Cart
New
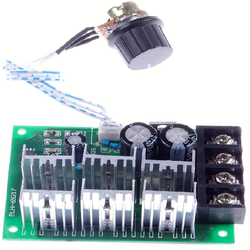
Motor Speed Controller - Adjustable PWM Speed Controller - 2000W 9V-55V DC 40A
278.17
TL
Add to Cart
New
MX1508 DC Motor Driver Module - 2 Channel PWM Speed Control
28.13
TL
Add to Cart
A4988 Step Motor Driver Board (Red PCB)
Out Of Stock
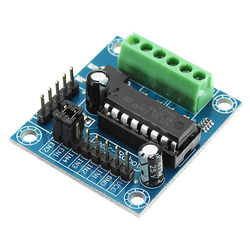
Mini 4 Channel L293D Motor Driver Module
Out Of Stock
12-40V 10A Motor Driver Board (400W)
Out Of Stock
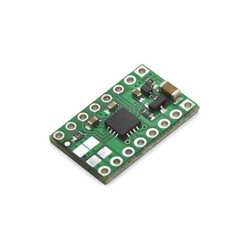
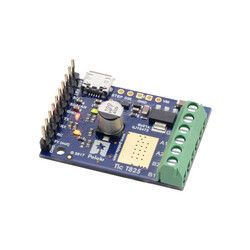
Tic T825 USB Multi-Interface Stepper Motor Controller
Out Of Stock
A4988 Step Motor Driver Board PL-1182
Out Of Stock
Tic T500 USB Multi-Interface Stepper Motor Controller
Out Of Stock
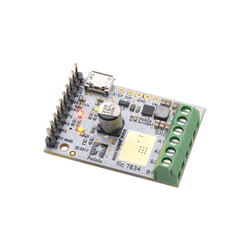
Tic T834 USB Multi-Interface Stepper Motor Controller
Out Of Stock
New
A4988 2A Stepper Motor Driver - Original Chip
Out Of Stock
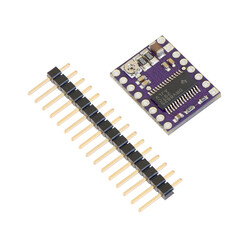
New
Stepper Motor Driver Controller (Speed, Forward and Reverse Control, Pulse Generation, PWM Controller)
Out Of Stock
There is a total of
35
products
Prepared by
T
-Soft
E-Commerce
.