Marka
:
Pololu
Ürün Kodu
:
18241
Ölçüm Parametresi
:
Mesafe Ölçüm Aralığı
:
400cm Çalışma Voltajı
:
2.6-5.5V/DC 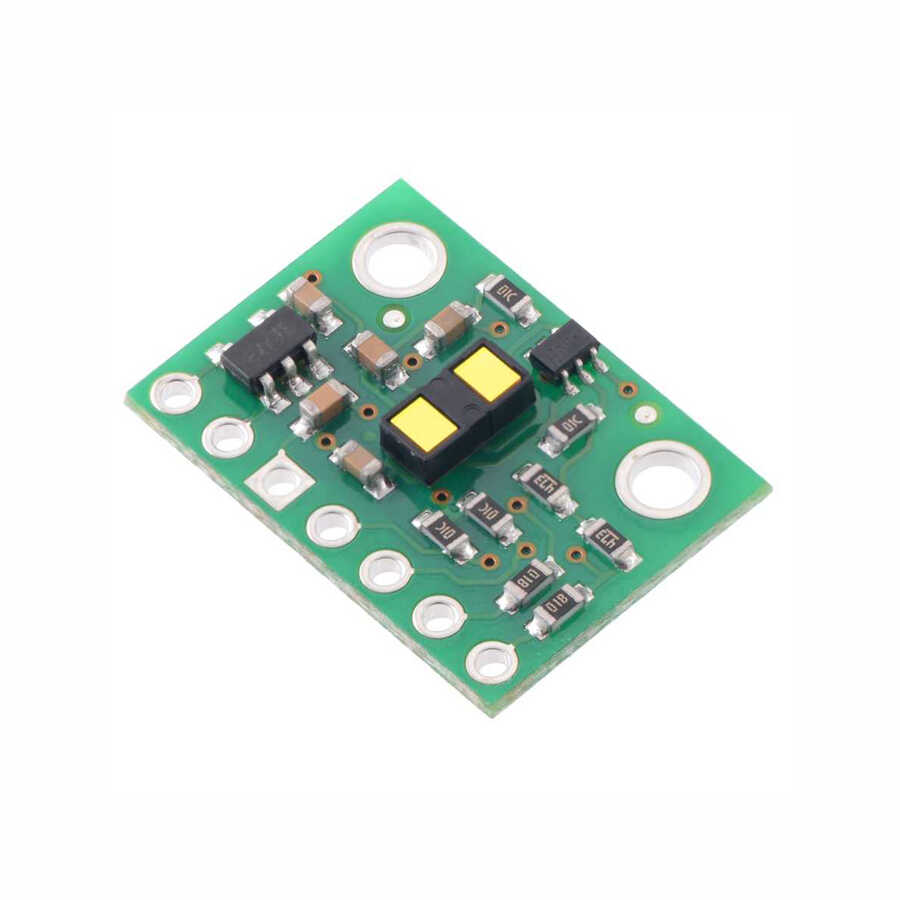
Tükendi
Gelince Haber Ver


VL53l1X Time-of-Flight Mesafe Sensörü
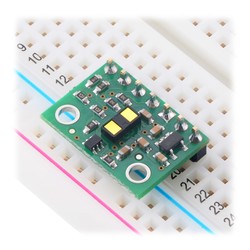
Bu sensör, ST firmasının VL53L1X lazer aralık sensörü için bir taşıyıcı/kırma kartıdır ve 4 metreye kadar hızlı ve doğru mesafe ölçümü sunar. Görünmez, göz güvenli lazer darbelerinin uçuş süresini (ToF) kullanarak, ortam aydınlatma koşullarından ve renk, şekil ve doku gibi hedef özelliklerinden bağımsız olarak mutlak mesafeleri ölçer. VL53L1X ayrıca programlanabilir bir ilgi bölgesine (ROI) sahiptir; bu sayede tam görüş alanı azaltılabilir veya birden fazla bölgeye ayrılabilir. Mesafe ölçümleri dijital I²C arabirimi aracılığıyla okunabilir. Kartta 2.8 V lineer regülatör ve seviye kaydırıcılar bulunur; bu da giriş voltaj aralığı 2.6 V ile 5.5 V olan cihazların çalışmasına izin verir ve .1″ pin aralığı standart lehimleme yapılmayan breadboard'lar (lehim gerektirmeyen devre kartları) ile kolayca kullanılmasını sağlar.
ST Microelectronics'in VL53L1X modeli uzun menzilli uçuş süresi (TOF) sensörünün kompakt bir modül içine entegre edildiği tahtadır.
VL53L1X datasheet'i (1MB pdf), bu ürünü kullanmadan önce dikkatlice okunması tavsiye edilir.
VL53L1X etkili bir şekilde entegre edilmiş olan 940 nm Class 1 lazer içeren küçük, kendi kendine yeten bir lidar sistemidir; bu lazer görünmezdir ve göz güvenlidir.
Nesneye olan uzaklığı tahmin etmek için yansıtılan ışığın yoğunluğunu kullanan geleneksel IR sensörlerinin aksine VL53L1X, nesneye en yakın olana kadar yayılan kızılötesi laser işık darbelerinin ne kadar sürede algılayıcıya geri yansıtılacağını kesin olarak ölçmek için ST'nin FlightSense teknolojisini kullanır.
Bu yaklaşım mutlak mesafe ölçümünü sağlar ve ortam aydınlatma koşulları ile hedef karakteristikleri (renk, şekil, doku ve yansıtıcılık gibi) konusunda bağımsız kalmasını sağlar; ancak bu harici koşullar da sensor maksimum menzilini etkiler - aynısı sensor konfigürasyonu ayarları için de geçerlidir.
Daha uygun koşullarda - düşük ortam aydınlatmasıyla yüksek yansımaya sahip hedef - sensor rapor edebileceği maksimum menzil kapasitesi , repeatability , rang ing error gibi durumların nasıl etkilendiği hakkında daha fazla bilgi için datasheet e bakabilirsiniz 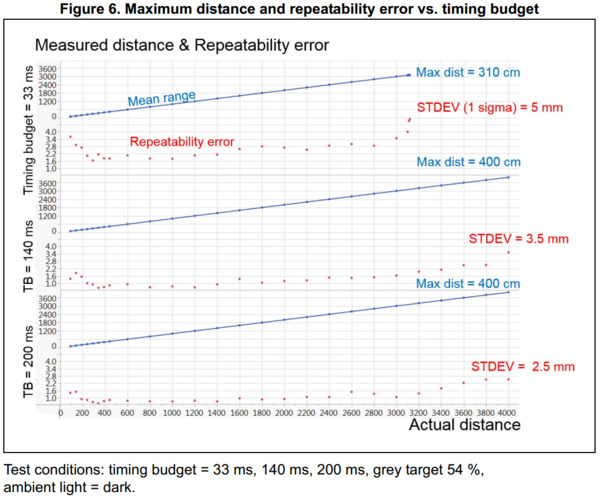
VL53L1X üç mesafe modu sunar: kısa, orta ve uzun. Uzun mesafe modu, 4 m'lik mümkün olan en uzun menzil mesafesine izin verir, ancak maksimum menzil, ortam ışığından önemli ölçüde etkilenir. Kısa mesafe modu çoğunlukla ortam ışığından etkilenmez ancak maksimum menzil mesafesi genellikle 1,3 m (4,4 ft) ile sınırlıdır. Kısa mesafe modunda maksimum örnekleme hızı 50 Hz, orta ve uzun mesafe modları için maksimum örnekleme hızı 30 Hz'dir. Performans, daha düşük örnekleme oranları ve daha uzun zamanlama bütçeleri kullanılarak (yukarıdaki şekilde görülebileceği gibi) tüm modlarda artırılabilir.
Gelişmiş uygulamalar için VL53L1X, belirli bir mesafenin altında, belirli bir mesafenin ötesinde, bir aralığın dışında veya bir aralık içinde bir hedef tespit edildiğinde kesintileri tetiklemek için kullanılabilecek yapılandırılabilir eşikleri destekler. Ayrıca, hiçbir hedef olmadığında kesinti oluşturan alternatif bir algılama modunu da destekler. Ayrıca önceki modellerden farklı olarak VL53L1X, tam 16x16 algılama dizisi içinde yapılandırılabilir bir ilgi bölgesini (ROI) destekleyerek görüş alanını (FoV) azaltmanıza olanak tanır. 265 algılama öğesinin tamamı etkinleştirildiğinde FoV 27°'dir. Gelişmiş varlık algılama için özel olarak ayarlanmış bir "Otonom Düşük Güç" modu mevcuttur. Bu mod, ilgilenilen bölgede yapılandırılmış mesafe eşikleri dahilinde bir insan veya nesne tespit edildiğinde ana bilgisayarı otomatik olarak kapatarak veya uyandırarak önemli miktarda sistem gücü tasarrufu sağlar.
VL53L1X harika bir entegre devredir ancak küçük, kurşunsuz LGA paketi, tipik bir öğrencinin veya hobicinin kullanımını zorlaştırır. Ayrıca önerilen 2,8 V voltajda da çalışır; bu, 3,3 V veya 5 V'ta çalışan mikro denetleyiciler için arayüz oluşturmayı zorlaştırabilir. Ara kartımız bu sorunları ele alarak, genel boyutu küçük tutarken sensörü kullanmaya başlamayı kolaylaştırır. olabildiğince.
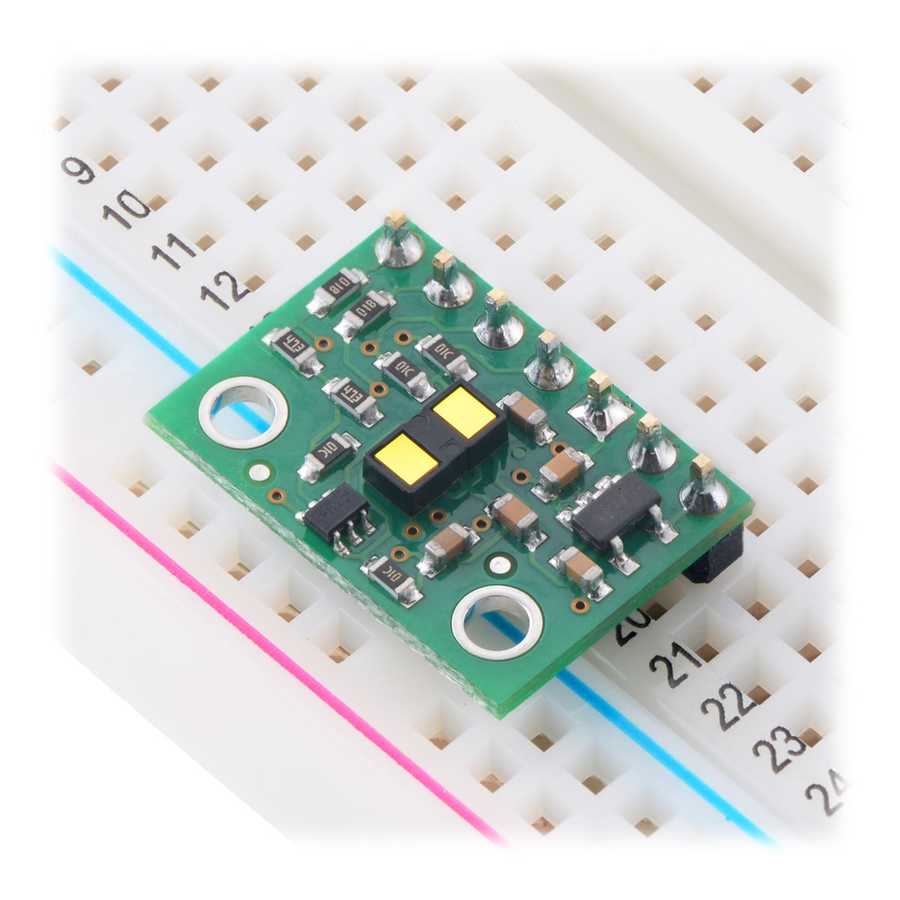
Taşıyıcı kart, VL53L1X'in gerektirdiği 2,8 V'yi sağlayan ve sensörün 2,6 V'tan 5,5 V'a kadar bir beslemeyle çalıştırılmasına olanak tanıyan düşük kayıplı bir doğrusal voltaj regülatörü içerir. Regülatör çıkışı VDD pininde mevcuttur ve harici cihazlara neredeyse 150 mA besleyebilir. Devre kartı aynı zamanda I²C saatini ve veri hatlarını sağlanan VIN ile aynı mantık voltajı seviyesine kaydıran bir devre içerir, bu da kartın 3,3 V veya 5 V sistemlerle arayüzlenmesini kolaylaştırır ve kartın 0,1" pin aralığı bunu kolaylaştırır. standart lehimsiz devre tahtaları ve 0,1″ perfboard'larla kullanımı kolaydır. Anakart, ürün resminde gösterildiği gibi VL53L1X de dahil olmak üzere SMD bileşenleriyle tamamen dolu olarak gönderilir.
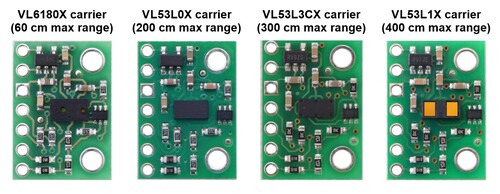
Benzer ancak daha kısa menzilli sensörler için 200 cm VL53L0X taşıyıcımıza ve 60 cm VL6180X taşıyıcımıza bakın. Bunların her ikisi de VL53L1X taşıyıcısının fiziksel olarak takılabilen yedek parçalarıdır ancak farklı API'lere sahiptirler, dolayısıyla VL53L1X yazılımının VL53L0X veya VL6180X ile çalışacak şekilde yeniden yazılması gerekecektir.
Özellikler ve Spesifikasyonlar
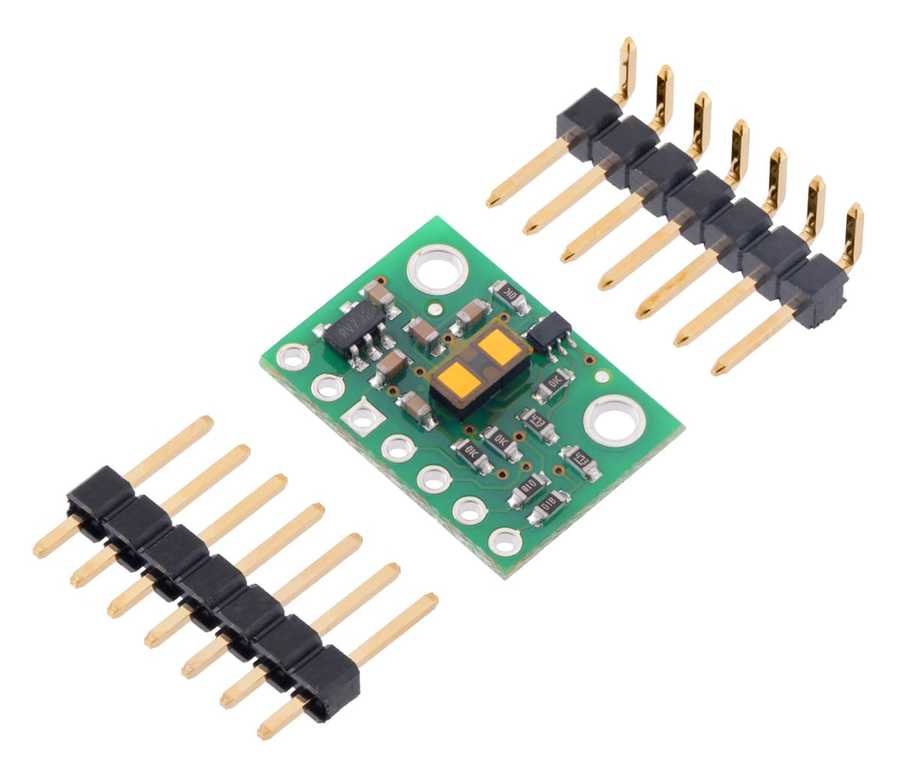
Dahil Edilen BileşenlerAşağıdaki resimde gösterildiği gibi 1×7 şerit 0,1″ başlık pimleri ve 1×7 şerit 0,1″ dik açılı başlık pimleri dahildir. Özel kablolarla veya lehimsiz devre tahtalarıyla kullanmak için seçtiğiniz başlık şeridini karta lehimleyebilirsiniz veya daha kompakt kurulumlar için kabloları doğrudan kartın kendisine lehimleyebilirsiniz.
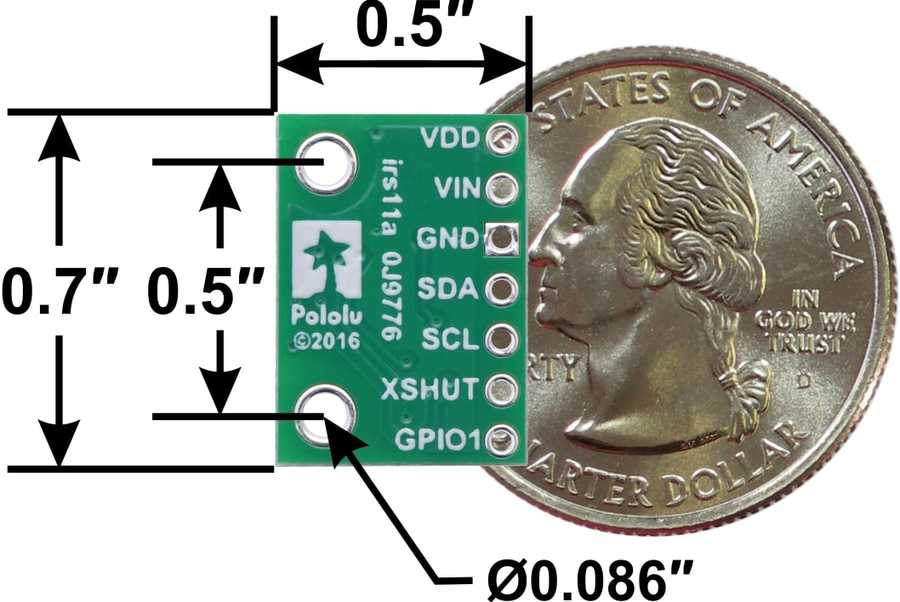
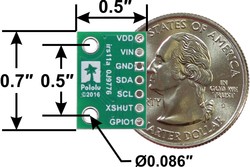
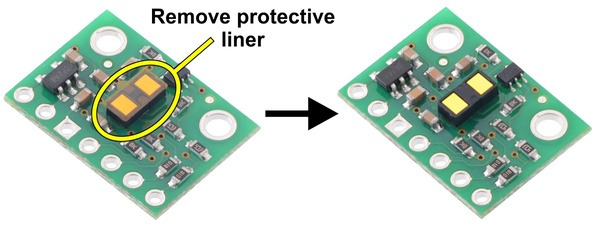
Kartta, #2 ve M2 vidalarla (dahil değildir) çalışan, birbirinden 0,5 inç aralıklı iki montaj deliği bulunur.Önemli Not: Bu ürün, sensör IC'sini kaplayan koruyucu bir astarla birlikte gönderilebilir. Doğru algılama performansı için astarın çıkarılması gerekir.
VL53L1X kartını kullanmak için en az dört bağlantı gereklidir: VIN, GND, SCL ve SDA. VIN pini 2,6 V ila 5,5 V kaynağa, GND ise 0 volta bağlanmalıdır. Yerleşik bir doğrusal voltaj regülatörü, VIN'i VL53L1X IC için 2,8 V beslemeye dönüştürür. Giriş voltajınız 3,5 V'un altındaysa regülatörü baypas etmek yerine doğrudan VDD'ye bağlayabileceğinizi unutmayın; bu konfigürasyonda VIN bağlantısı kesilmiş kalmalıdır.I²C pinleri, SCL ve SDA, 2,8 V'un üzerindeki voltajlarda kullanılmalarını güvenli kılan yerleşik seviye değiştiricilere bağlıdır; VIN ile aynı mantık düzeyinde çalışan bir I²C veri yoluna bağlanmalıdırlar.XSHUT pimi bir giriştir ve GPIO1 pimi bir açık drenaj çıkışıdır; her iki pin de kart tarafından 2,8 V'a kadar çekilir. Karttaki seviye değiştiricilere bağlı değildirler ve 5V toleranslı değildirler, ancak birçok 3,3 V ve 5 V mikro denetleyiciyle olduğu gibi kullanılabilirler: mikro denetleyici, mantık yüksek eşiği 2,8'in altında olduğu sürece GPIO1 çıkışını okuyabilir. V ve mikrodenetleyici, XSHUT pinini sürmek için kendi çıkışını düşük ve yüksek empedans durumları arasında değiştirebilir. Alternatif olarak 4 kanallı çift yönlü mantık seviye değiştiricimiz bu pinlerle harici olarak kullanılabilir.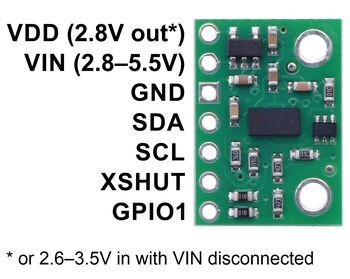
| PIN | Description |
|---|---|
| VDD | Düzenlenmiş 2,8 V çıkış. Harici bileşenlere güç sağlamak için neredeyse 150 mA mevcuttur. (Dahili regülatörü bypass etmek istiyorsanız bunun yerine bu pimi, VIN bağlantısı kesilmişken 2,6 V ile 3,5 V arasındaki voltajlar için giriş olarak kullanabilirsiniz.) |
| VIN | Bu, 2,6 V ile 5,5 V arasındaki ana güç kaynağı bağlantısıdır. SCL ve SDA seviye değiştiricileri I²C hatlarını bu seviyeye çeker. |
| GND | Güç kaynağınız için toprak (0 V) bağlantısı. I²C kontrol kaynağınız da bu kartla ortak bir zemini paylaşmalıdır. |
| SDA | Seviye kaydırmalı I²C veri hattı: YÜKSEK VIN'dir, DÜŞÜK 0 V'dir |
| SCL | Seviye kaydırmalı I²C saat çizgisi: YÜKSEK VIN, DÜŞÜK 0 V'dir |
| XSHUT | Bu pin aktif-düşük kapatma girişidir; kart, sensörü varsayılan olarak etkinleştirmek için onu VDD'ye çeker. Bu pinin düşük seviyeye çekilmesi, sensörü donanım bekleme moduna geçirir. Bu giriş seviye kaydırmalı değildir. |
| GPIO1 | Programlanabilir kesme çıkışı (VDD mantık seviyesi). Bu çıkış seviye kaydırmalı değildir. |
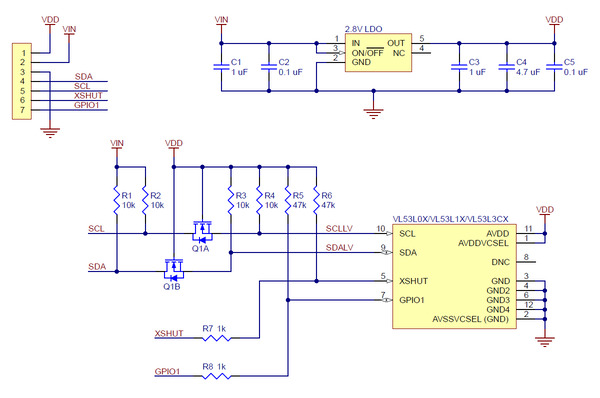
Yukarıdaki şema, kartın 2,6 V'tan 5,5 V'ye kadar bir beslemeden çalıştırılmasına olanak tanıyan voltaj regülatörü ve I²C iletişimine izin veren seviye değiştirici devresi dahil olmak üzere VL53L1'in kullanımını kolaylaştırmak için taşıyıcı kartın içerdiği ek bileşenleri gösterir. VIN ile aynı mantıksal voltaj seviyesi. Bu şema aynı zamanda indirilebilir bir PDF (110k pdf) olarak da mevcuttur.I²C iletişimiVL53L1X yapılandırılabilir ve mesafe okumaları I²C veri yolu üzerinden sorgulanabilir. I²C saati (SCL) ve veri (SDA) hatlarındaki seviye değiştiriciler, VIN ile aynı voltajda (2,6 V ila 5,5 V) çalışan mikro denetleyicilerle I²C iletişimini sağlar. VL53L1X'teki I²C arayüzünün ayrıntılı bir açıklaması veri sayfasında (1MB pdf) bulunabilir ve genel olarak I²C hakkında daha ayrıntılı bilgi NXP'nin I²C-veri yolu spesifikasyonunda (1MB pdf) bulunabilir.Sensörün 7 bitlik köle adresi, açılışta varsayılan olarak 0101001b olur. Cihaz konfigürasyon kayıtlarından biri yazılarak başka herhangi bir değere değiştirilebilir, ancak yeni adres yalnızca sensör sıfırlanana veya kapatılana kadar geçerli olur. ST, her bir sensörü ayrı ayrı sıfırlama durumundan çıkararak ve ona benzersiz bir adres atayarak aynı I²C veri yolu üzerinde birden fazla VL53L0X sensörünün nasıl kullanılacağını açıklayan bir uygulama notu (196k pdf) sağlar ve yaklaşım, bunun yerine VL53L1X'e uygulanacak şekilde kolayca uyarlanabilir. .VL53L1X'teki I²C arayüzü, I²C hızlı mod (400 kHz) standardıyla uyumludur. Kart üzerinde yaptığımız testlerde çip ile 400 kHz'e kadar saat frekanslarında iletişim kurmayı başardık; daha yüksek frekanslar işe yarayabilir ancak test edilmemiştir.Diğer birçok cihaz için mevcut bilgilerin aksine ST, VL53L1X'in yapılandırılması ve kontrol edilmesiyle ilgili bir kayıt haritasını, açıklamaları veya diğer belgeleri kamuya yayınlamadı. Bunun yerine, sensörle iletişimin, düşük seviyeli arayüzle ilgilenen bir dizi C işlevi olan ST'nin VL53L1X API'si (STSW-IMG007) aracılığıyla yapılması amaçlanıyor. VL53L1X'i kullanmak için API belgelerindeki bilgileri kullanarak API'yi seçtiğiniz bir ana bilgisayar platformunda çalışacak şekilde özelleştirebilirsiniz. Alternatif olarak API kaynak kodunu kendi uygulamanız için bir kılavuz olarak kullanmak da mümkündür.Basit KodVL53L1X için, bu sensörü Arduino® kartları veya Arduino® uyumlu bir kontrol cihazıyla arayüzlemek için ST'nin resmi API'sine alternatif olarak kullanılabilecek temel bir kütüphane yazdık. Kütüphane, VL53L1X'i yapılandırmayı ve mesafe verilerini I²C aracılığıyla okumayı kolaylaştırır. Ayrıca kitaplığın nasıl kullanılacağını gösteren örnek çizimler de içerir.Ayrıca örnek bir çizim de dahil olmak üzere ST'nin Arduino için VL53L1X API'sinin bir uygulamasına sahibiz. Kitaplığımızla karşılaştırıldığında API daha karmaşık bir arayüze sahiptir ve daha fazla depolama ve bellek kullanır, ancak kitaplığımızın sağlamadığı bazı gelişmiş işlevler sunar ve daha güçlü hata denetimine sahiptir. Özellikle depolama ve belleğin daha az sorun olduğu durumlarda, gelişmiş uygulamalar için API'yi kullanmayı düşünün.Boyutlar:| Boyut: | 0.5″ × 0.7″ × 0.085″1 |
|---|---|
| Ağırlık: | 0.5 g1 |
| Çözünürlük | 1 mm |
|---|---|
| Maksimum Mesafe | 400 cm2 |
| Minimum Mesafe | 4 cm3 |
| Arayüz | I²C |
| Minimum Operasyon Voltajı | 2.6 V |
| Maximum Operasyon Voltajı | 5.5 V |
| Besleme Akımı | 15 mA4 |
İşaretlerin Tanımlanması:18241