1000 TL ve Üzeri Alışverişlerinizde KARGO BEDAVA!
0
Sepetim
Giriş Yap
Tüm Kategoriler
Arduino
Arduino Modelleri
Arduino Setleri
Arduino Shield
Arduino Sensör / Modül
Raspberry Pi
Setler
Modeller
Ekranlar
Muhafaza Kutuları
SD Kartlar
Elektronik Kartlar
Kablolar
Aksesuarlar
3D
3D Yazıcı
3D Yazıcı Parçaları / DIY
3D Filament
3D Kalem Yazıcı
3D Tarayıcı
CNC
Eğitici Setler
Arduino Setleri
Robotistan Özel Ürünler
REX
Deney Setleri
Raspberry Pi Setleri
Robot Kitleri
Makeblock
Kendin Yap Kitleri
BBC Micro:Bit
Kodlama Tasarım Beceri Atölyeleri
Okul Eğitim Setleri
Grove Modül ve Setler
DFRobot
LEGO
Kodlama - Online Eğitimler
Tinylab Eğitim Setleri
Robot Yarışması
Çocuklar İçin
Okul Öncesi (4-7 Yaş)
İlkokul (7-10 Yaş)
Ortaokul (10-14 Yaş)
Lise ve Üstü (14+ Yaş)
Geliştirme Kartı
Tinylab
ST/STM Arm Geliştirme Kartı
LattePanda
BeagleBoard
FPGA
Orange Pi
Robotik Kartlar
NodeMCU / ESP
NVIDIA
ASUS
Diğer Kartlar
Giyilebilir - Lilypad
Elektronik Kart
Adreslenebilir LED (NeoPixel)
Motor Sürücü Kartı
Voltaj Regülatör Kartı
Röle/MOSFET Kartları
Dönüştürücü
Programlayıcı
Modüller
Ekran
Motor
Servo Motor
Step Motor
Titreşim Motoru
Fırçasız Motor
Redüktörlü DC Motor
Redüktörsüz DC Motor
Fan
Sıvı/Hava Pompa
Lineer Akülatör
Yüksek Torklu DC Motor
Sensör
Voltaj / Akım
Sıvı ve Yağmur Sensörleri
Sıcaklık / Nem
Manyetik / Enkoder
Kuvvet / Titreşim / Eğim
İvmeölçer / Jiroskop
Işık / Renk
Gaz
Çoklu Sensör Kartı (IMU)
Çizgi / Cisim / Mesafe
Biyometrik / Medikal
Basınç / Pusula
Diğer Sensörler
Güç Kaynağı - Batarya
Taşınabilir Şarj (Powerbank)
Pil
Li-Po , Li-ion Pil
Kuru Akü
Güneş Pili
Güç Kaynağı
Batarya Aksesuarları
Adaptör - Şarj Aleti
Prototipleme / Lehimleme
Lehim Ekipmanı
Jumper Kablo
Havya / İstasyon
Delikli Pertinaks
Breadboard
Bakır Plaket / PCB
Kablosuz Haberleşme
Xbee
Wifi
RF
GSM
GPS
Bluetooth
Anten ve Konektör
Komponent
Voltaj Regülatörü
Varistör, NTC ve PTC
Trimpot
Transistör
Sigorta
Röle
Potansiyometre
Peltier
Optokuplör
Mosfet
Mikrodenetleyici
Led, Lcd ve Display
Kristal Osilatör
Kondansatör
Klemens ve Konnektör
Keypad (Tuş Takımı)
Joystick
Entegre
Diyot
Direnç
Dip Soket
Buzzer/Hoparlör
Bobin
Anahtar, Buton, Switch
Mekanik
Sensör Tutucu
Robotik Aparat
Plastik Aralayıcı
Motor Tutucu
Metal Aralayıcı
Kaplin
HUB / Motor Teker Bağlantı
Gövde
Elektromıknatıs
Civata / Somun / Pul
Tekerlek
Setskurlu Tekerlek
Sarhoş Tekerlek
Palet / Serbest Teker
Omni ve Mecanum Tekerlek
Geçmeli Tekerlek
Ölçü ve Test Aleti
Termometre
Osiloskop
Multimetre
Diğer Ölçü ve Test Aletleri
Araç - Gereç
Yan Keski / Kablo Soyucu
Silikon Tabancası
Muhafaza Kutusu
Malzeme Kutusu
Kırtasiye
Kesme Matı
Kesici / Delici
Kargaburun / Pense
Kablo ve Dönüştürücü
Isıyla Daralan Makaron
Diğer
Cımbız / Tornavida
Büyüteç / Tutacak
Bant
Antistatik
Kablo Bağı
Drone
Multikopter / Drone
Drone Parçaları / DIY
Konnektör
Servo Uzatma Kablosu
2.4 Ghz Kumanda
Drone Batarya
Outlet
Raspberry Pi Outlet
3D Outlet
Eğitici Setler Outlet
Geliştirme Kartı Outlet
Elektronik Kart Outlet
Komponent Outlet
Tekerlek Outlet
Drone Outlet
Diğer Outlet
Kitap
Arduino
Web
Elektronik ve Robotik
Çocuklar için
Bilgisayar ve Programlama
Diğer Kitaplar
Yeni Ürünler
Blog
Sana Özel
Outlet
Kurumsal Satış
Arıza Kaydı
TR
Türkçe
English
TL
TL
USD
EUR
GBP
Menü
Tüm Kategoriler
Tüm Kategoriler
Arduino
Arduino
Arduino Modelleri
Arduino Setleri
Arduino Shield
Arduino Sensör / Modül
Tümünü Gör
Raspberry Pi
Raspberry Pi
Setler
Modeller
Ekranlar
Muhafaza Kutuları
SD Kartlar
Elektronik Kartlar
Kablolar
Aksesuarlar
Tümünü Gör
3D
3D
3D Yazıcı
3D Yazıcı Parçaları / DIY
3D Filament
3D Kalem Yazıcı
3D Tarayıcı
CNC
Tümünü Gör
Eğitici Setler
Eğitici Setler
Arduino Setleri
Robotistan Özel Ürünler
REX
Deney Setleri
Raspberry Pi Setleri
Robot Kitleri
Makeblock
Kendin Yap Kitleri
BBC Micro:Bit
Kodlama Tasarım Beceri Atölyeleri
Okul Eğitim Setleri
Grove Modül ve Setler
DFRobot
LEGO
Kodlama - Online Eğitimler
Tinylab Eğitim Setleri
Robot Yarışması
Tümünü Gör
Çocuklar İçin
Çocuklar İçin
Okul Öncesi (4-7 Yaş)
İlkokul (7-10 Yaş)
Ortaokul (10-14 Yaş)
Lise ve Üstü (14+ Yaş)
Tümünü Gör
Geliştirme Kartı
Geliştirme Kartı
Tinylab
ST/STM Arm Geliştirme Kartı
LattePanda
BeagleBoard
FPGA
Orange Pi
Robotik Kartlar
NodeMCU / ESP
NVIDIA
ASUS
Diğer Kartlar
Giyilebilir - Lilypad
Tümünü Gör
Elektronik Kart
Elektronik Kart
Adreslenebilir LED (NeoPixel)
Motor Sürücü Kartı
Voltaj Regülatör Kartı
Röle/MOSFET Kartları
Dönüştürücü
Programlayıcı
Modüller
Ekran
Tümünü Gör
Motor
Motor
Servo Motor
Step Motor
Titreşim Motoru
Fırçasız Motor
Redüktörlü DC Motor
Redüktörsüz DC Motor
Fan
Sıvı/Hava Pompa
Lineer Akülatör
Yüksek Torklu DC Motor
Tümünü Gör
Sensör
Sensör
Voltaj / Akım
Sıvı ve Yağmur Sensörleri
Sıcaklık / Nem
Manyetik / Enkoder
Kuvvet / Titreşim / Eğim
İvmeölçer / Jiroskop
Işık / Renk
Gaz
Çoklu Sensör Kartı (IMU)
Çizgi / Cisim / Mesafe
Biyometrik / Medikal
Basınç / Pusula
Diğer Sensörler
Tümünü Gör
Güç Kaynağı - Batarya
Güç Kaynağı - Batarya
Taşınabilir Şarj (Powerbank)
Pil
Li-Po , Li-ion Pil
Kuru Akü
Güneş Pili
Güç Kaynağı
Batarya Aksesuarları
Adaptör - Şarj Aleti
Tümünü Gör
Prototipleme / Lehimleme
Prototipleme / Lehimleme
Lehim Ekipmanı
Jumper Kablo
Havya / İstasyon
Delikli Pertinaks
Breadboard
Bakır Plaket / PCB
Tümünü Gör
Kablosuz Haberleşme
Kablosuz Haberleşme
Xbee
Wifi
RF
GSM
GPS
Bluetooth
Anten ve Konektör
Tümünü Gör
Komponent
Komponent
Voltaj Regülatörü
Varistör, NTC ve PTC
Trimpot
Transistör
Sigorta
Röle
Potansiyometre
Peltier
Optokuplör
Mosfet
Mikrodenetleyici
Led, Lcd ve Display
Kristal Osilatör
Kondansatör
Klemens ve Konnektör
Keypad (Tuş Takımı)
Joystick
Entegre
Diyot
Direnç
Dip Soket
Buzzer/Hoparlör
Bobin
Anahtar, Buton, Switch
Tümünü Gör
Mekanik
Mekanik
Sensör Tutucu
Robotik Aparat
Plastik Aralayıcı
Motor Tutucu
Metal Aralayıcı
Kaplin
HUB / Motor Teker Bağlantı
Gövde
Elektromıknatıs
Civata / Somun / Pul
Tümünü Gör
Tekerlek
Tekerlek
Setskurlu Tekerlek
Sarhoş Tekerlek
Palet / Serbest Teker
Omni ve Mecanum Tekerlek
Geçmeli Tekerlek
Tümünü Gör
Ölçü ve Test Aleti
Ölçü ve Test Aleti
Termometre
Osiloskop
Multimetre
Diğer Ölçü ve Test Aletleri
Tümünü Gör
Araç - Gereç
Araç - Gereç
Yan Keski / Kablo Soyucu
Silikon Tabancası
Muhafaza Kutusu
Malzeme Kutusu
Kırtasiye
Kesme Matı
Kesici / Delici
Kargaburun / Pense
Kablo ve Dönüştürücü
Isıyla Daralan Makaron
Diğer
Cımbız / Tornavida
Büyüteç / Tutacak
Bant
Antistatik
Kablo Bağı
Tümünü Gör
Drone
Drone
Multikopter / Drone
Drone Parçaları / DIY
Konnektör
Servo Uzatma Kablosu
2.4 Ghz Kumanda
Drone Batarya
Tümünü Gör
Outlet
Outlet
Raspberry Pi Outlet
3D Outlet
Eğitici Setler Outlet
Geliştirme Kartı Outlet
Elektronik Kart Outlet
Komponent Outlet
Tekerlek Outlet
Drone Outlet
Diğer Outlet
Tümünü Gör
Kitap
Kitap
Arduino
Web
Elektronik ve Robotik
Çocuklar için
Bilgisayar ve Programlama
Diğer Kitaplar
Tümünü Gör
Yeni Ürünler
Blog
Sana Özel
Outlet
Kurumsal Satış
Arıza Kaydı
Bildirimler
Türkçe
Türkçe
English
Türk Lirası
TL
USD
EUR
GBP
Yardım ve Destek
Giriş Yap
Beni Hatırla
Şifremi Unuttum
Giriş Yap
Kayıt Ol
ile bağlan
ile bağlan
Sepetim
Filtre
{{ CAT. NAME }}
{{ SUB. NAME }}
{{ SUB. NAME }}
{{ FILTERS.VARIANTS.TYPE1_NAME }}
{{ V1.NAME }}
{{ FILTERS.VARIANTS.TYPE2_NAME }}
{{ V2.NAME }}
Marka
{{ B.NAME }}
{{ !is_brand ? "Daha Fazla " : "Daha Az" }}
Model
{{ M.NAME }}
{{ FILTER.NAME }}
{{ F.NAME }}
{{ F.NAME }}
Fiyat
Seçimi Filtrele
Daha Fazla
Daha Az
Filtre
Alfabetik A-Z
Alfabetik Z-A
Yeniden Eskiye
Eskiden Yeniye
Fiyat Artan
Fiyat Azalan
Rastgele
Puana Göre
Varsayılan Sıralama
Alfabetik A-Z
Alfabetik Z-A
Yeniden Eskiye
Eskiden Yeniye
Fiyat Artan
Fiyat Azalan
Rastgele
Puana Göre
Varsayılan Sıralama
%
6
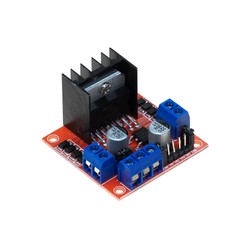
L298N Voltaj Regulatörlü Çift Motor Sürücü Kartı(Kırmızı PCB)
69,74
TL
65,78
TL
SEPETE EKLE
28 BYJ-48 Redüktörlü Step Motor ve ULN2003A Step Motor Sürücü Kartı
64,99
TL
SEPETE EKLE
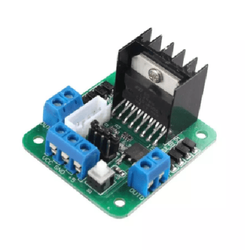
L298N Çift Motor Sürücü Kartı - Dual Motor Driver (Yeşil PCB)
119,67
TL
SEPETE EKLE
BTS7960B 40 Amper Motor Sürücü Kartı
206,05
TL
SEPETE EKLE
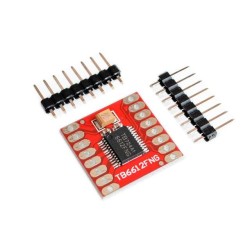
TB6612FNG Step Motor Sürücü / DC Motor Sürücü
95,89
TL
SEPETE EKLE
DRV8825 Step Motor Sürücü Kartı
79,25
TL
SEPETE EKLE
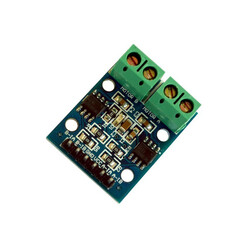
L9110 Çift Motor Sürücü Kartı
37,25
TL
SEPETE EKLE
A4988/DRV8825 Kontrol Kartı
55,48
TL
SEPETE EKLE
EasyDriver Step Motor Sürücü Kartı
313,04
TL
SEPETE EKLE
PCA9685 16 Kanal I2C PWM/Servo Sürücü Kartı (Klon)
165,63
TL
SEPETE EKLE
%
25
SparkFun Intel® Edison için Blok - Çift H Köprülü Motor Sürücü - Dual H-Bridge
1.030,26
TL
772,70
TL
SEPETE EKLE
micro:bit 16 Kanal Servo Motor Sürücü Kartı
606,27
TL
SEPETE EKLE
%
5
Raspberry Pi Motor Kartı v1.0
2.341,86
TL
2.224,77
TL
SEPETE EKLE
5-35 V 30 A 150 W Çift Motor Sürücü Kartı
1.787,90
TL
SEPETE EKLE
5-35 V 15 A Çift Motor Sürücü Kartı
747,73
TL
SEPETE EKLE
DRV8833 Çift Motor Sürücü Kartı - PL-2130
475,90
TL
SEPETE EKLE
12 Kanal USB Servo Motor Kontrol Kartı - PL-1352
2.714,34
TL
SEPETE EKLE
20 A ESC - Fırçasız Motor Sürücü Modülü
463,62
TL
SEPETE EKLE
6 Kanal USB Servo Motor Kontrol Kartı - PL-1350
1.046,11
TL
SEPETE EKLE
DRV8825 Step Motor Sürücü Kart - PL-2133
863,83
TL
SEPETE EKLE
Yeni
DRV8833 Step Motor Sürücü Kartı
49,14
TL
SEPETE EKLE
Yeni
MX1508 DC Motor Sürücü Modülü - 2 Kanal PWM Hız Kontrolü
28,13
TL
SEPETE EKLE
A4988 Step Motor Sürücü Kartı (Kırmızı PCB)
TÜKENDİ
Mini 4 Kanal L293D Motor Sürücü Kartı
TÜKENDİ
12-40 V 10 A Motor Sürücü Kartı (400 W)
TÜKENDİ
Tic T825 Step Motor Sürücü (PC-Serial-I2C-PWM-Analog)
TÜKENDİ
A4988 Step Motor Sürücü Kartı PL-1182
TÜKENDİ
Tic T500 Step Motor Sürücü (PC-Serial-I2C-PWM-Analog)
TÜKENDİ
Tic T834 Step Motor Sürücü (PC-Serial-I2C-PWM-Analog)
TÜKENDİ
Yeni
A4988 2A Step Motor Sürücü - Orijinal Çip
TÜKENDİ
Yeni
Motor Hız Kontrol Cihazı - Ayarlı PWM Hız Kontrol Regülatörü - 2000W 9V-55V DC 40A
TÜKENDİ
Yeni
Step Motor Sürücüsü Kontrol Cihazı (Hız, İleri ve Geri Kontrol, Darbe Üretimi, PWM Kontrol Cihazı)
TÜKENDİ
Toplam
35
ürün bulunmaktadır.
T
-Soft
E-Ticaret
Sistemleriyle Hazırlanmıştır.