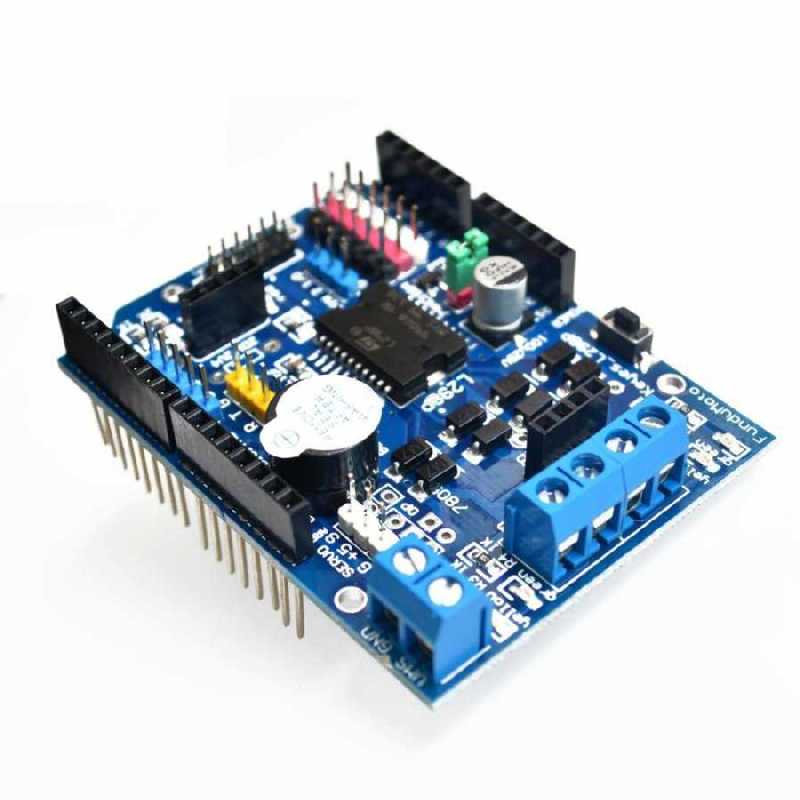
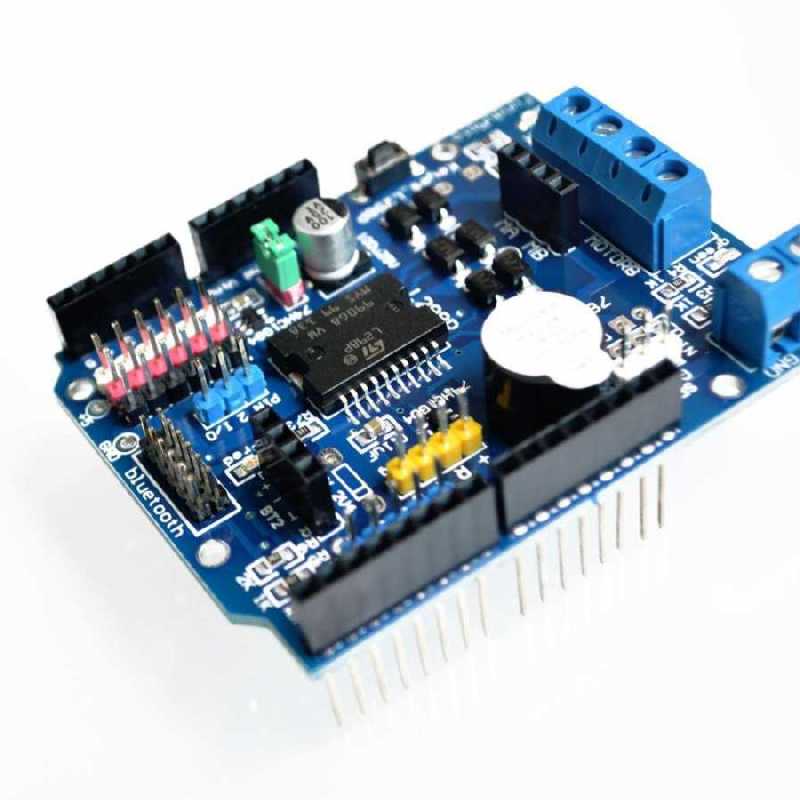
Motor Shield is based on L298 motor driver integrated circuit, a full- bridge motor driver. It can drive two seperate 2A DC motors or 1 2A step motor. Motor's velocity and directions can be controlled separately. Also there are 6 connectors connected to Arduino analog pins for fast prototyping. Signals can be given with buzzer on card when it is wanted.
Important P.S: To avoid short circuit between motor terminal on driver and Arduino's USB socket, stackable headers that comes with product should be sticked to the driver card. This way driver card gets higher and short cut is avoided.
Technical Proporties:
Operating Voltage
5V-12V
Motor Controller
L298P, 2 DC motor veya 1 step motor sürer
Max. Current
2A kanal başına (harici besleme ile)
Power:
Motor Shield should be only feeded with an external source. Because L298 integrated circuit has 2 seperate power connection, one for logic and other for motor feeding. Necessary motor current is usually bigger than max. current that given by USB.
External feeding can be giving by an adaptor or battery. Adaptor can be connected to 2.1mm central positive power socket or VMS and GND terminals on card by being carefull to polarity. But it is advised that power should be always given through terminal on driver. Because when we feed through power socket on Arduino, motor's current goes through Arduino and reach the driver. Hence Arduino Vin route can take only 1A current, Arduino card might get damaged. That is why external power always should be given through terminal on driver.
VMS terminal on driver is also connected to Arduino Vin pin through header. So when there is a power connection though terminal, Arduino gets power through Vin pin and steps- down it to 5V with its regulator. This way you do not need to use 2 seperate power sources. But as you know, Vin pin on Arduino takes input between 7V- 12V. In that case, if our input in driver card is between 5V- 7V since this voltage range is lower than regulator's minimum value, Arduino card do not work properly. To avoid this situation,there is a "OPT" driver card. This jumper connects VMS terminal on driver and Arduino's Vin pin. If voltage on terminal is between 5V- 7V, this jumper disconnects, VMS and Vin get seperated and Arduino starts operating with an external 5V. Later card can be returned the way it used be with this jumper. If voltage on terminal is between 7V- 12V, card can be used and jumper can stay as it is.
Input and Output:
Motor shield has two independent channel named A and B. Each channel is controlled with 2 Arduino pins. Shield uses 4 pins in total. By using this channels seperatly 2 seperate DC motor or by using them together 1 unipolar or bipolar step motor can be driven.
Shield pin table:
Function
Channel A Pin
Channel B Pin
Direction
D12
D13
PWM
D10
D11
Buzzer
D4
D4
Motor Connections:
You can use 2 brushed DC motor by connecting them to Motor A and Motor B terminals on the card. By making DIR A and DIR B pins HIGH or LOW, you can control direction of motors, by changing PWM A and PWM B pins fullnes rate, you can control velocity of motors.